HV Rover
1. Project Overview
This rover was developed in collaboration with cinematographer/director Matthew Hood to create an autonomous platform for filming large-scale, dynamic, landscape timelapses in natural environments. See below for an initial demonstration of these timelapses. Filmed in Death Valley, California.
2. Design Solution
Traditional time-lapses in film are achieved with either stationary tripods, or linear slide rails often not exceeding several meters in length. High speed time-lapses (hyper-lapses) can be achieved using helicopters or drones. Realizing a niche for low speed, long distance time-lapses, filmed over several hours to several days, this robot was developed with the goal of navigating between several GPS waypoints autonomously while a a gimbal-stabilized camera took photos at regular intervals. This results in long dynamic shots of the rolling night sky, snow accumulating, and clouds drifting in the wind.
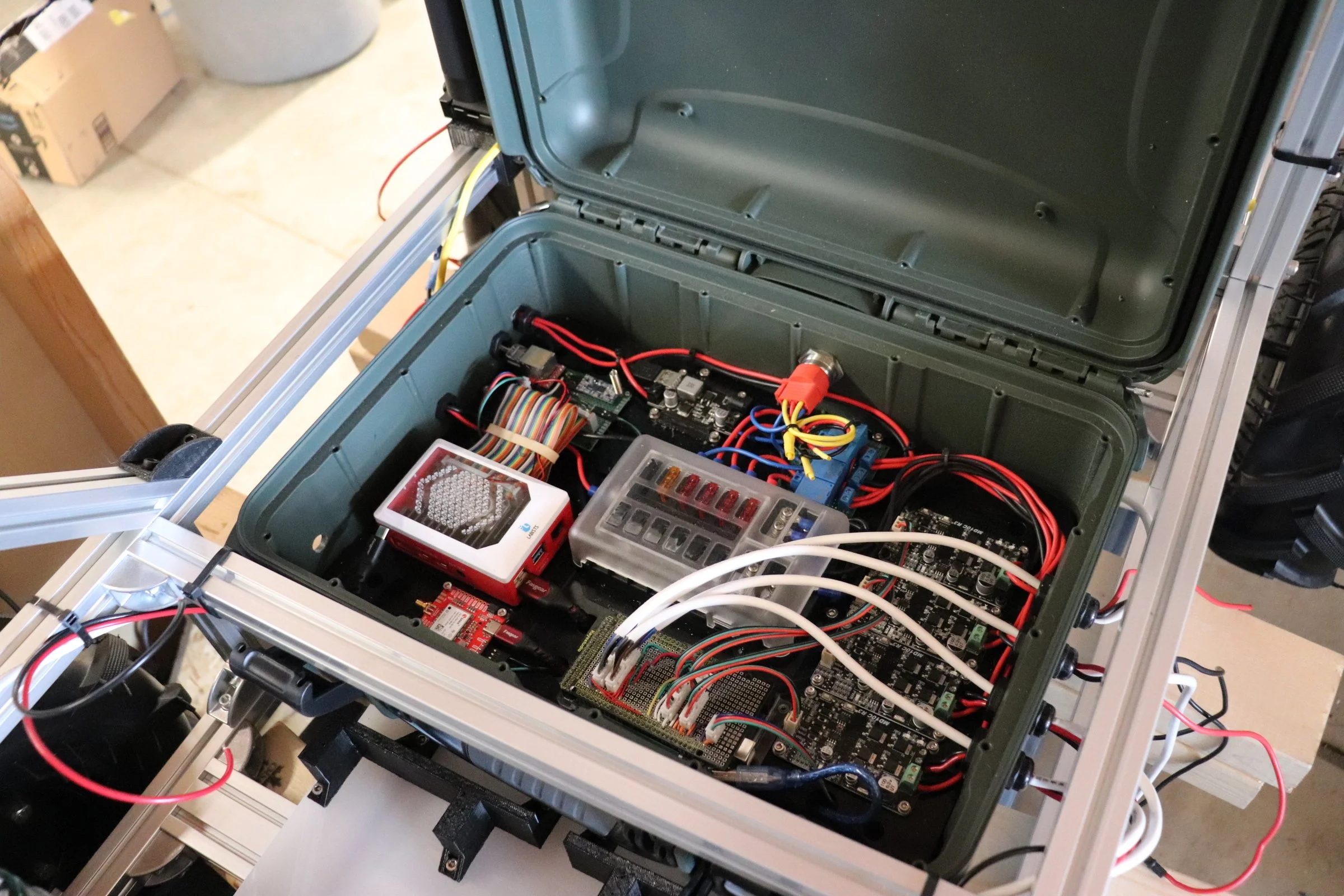
To achieve reliable GPS coordinate tracking, a portable base station was also developed, enabling RTK (real-time kinematics) positioning giving GPS coordinates with up to 13mm accuracy. Additional sensors include a compass, motor encoders, and an inertial measurement unit (IMU). The electronics are stored in a waterproof hardcase with the entire rover being designed with modularity in mind to ensure easy repairs and reconfiguration in the field.