OMNi
A modular, semi-autonomous, omnidirectional robot for telepresent applications
1. Project Overview
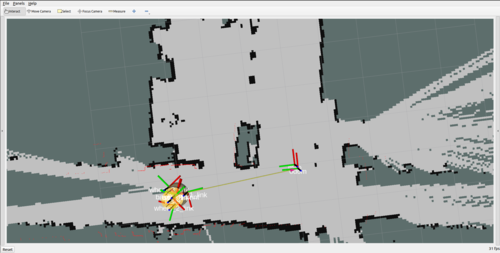
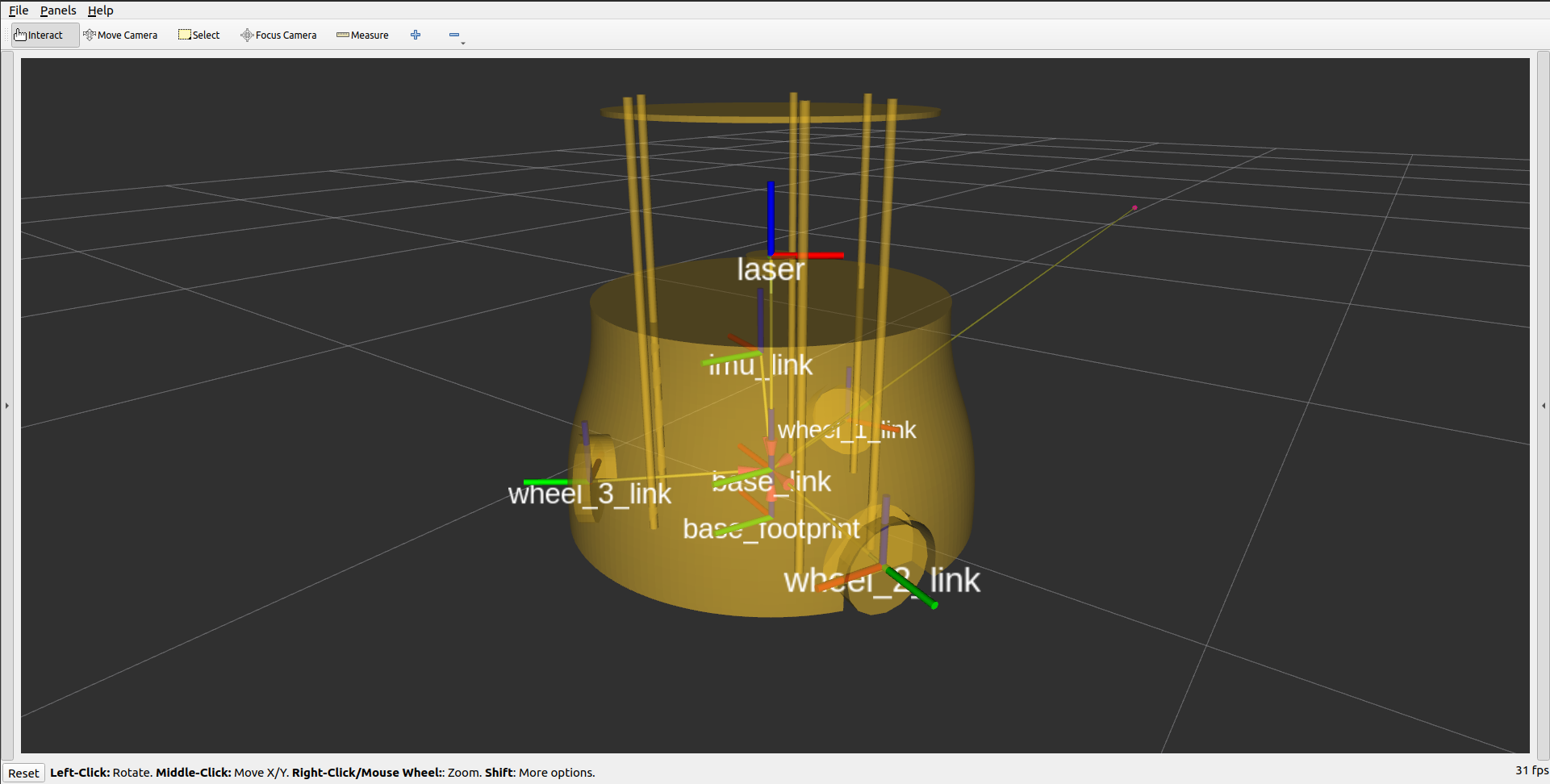
OMNi is a modular, semi-autonomous, omnidirectional robot for telepresent applications in museums. Initially developed as a museum assistant for staff and visitors, its versatility extends to applications in aged care, education, information kiosks, and dining services. The robot uses a LiDAR scanner to build a two-dimensional map of its environment and collects data from motor encoders and an internal measurement unit (IMU) to make odometry calculations via an extended Kalman filter (EKF). Together these sensors enable the robot to autonomously navigate between locations while detecting and avoiding obstacles. The software runs on a Raspberry Pi 4, Ubuntu 20.04, ROS 2 Fitzroy Foxy.
This project was developed in collaboration with EDM Studio.
Project documentation is available here.
Since initially developing this project with EDM Studio, we have opted to share the design publicly such that the robot can be reproduced by anyone. The following videos share details of the build process as well as some behind the scenes pictures and videos.
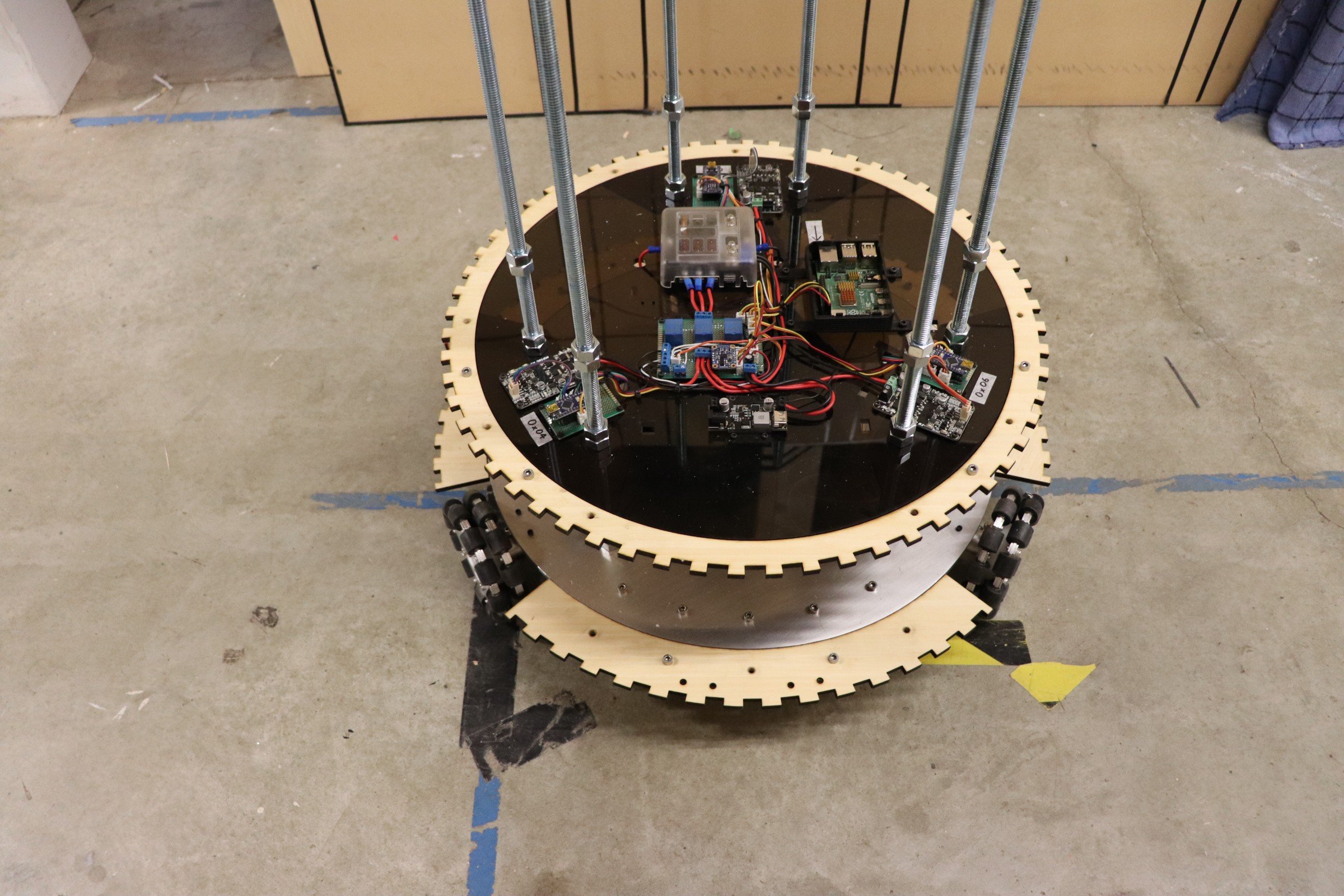
2. Omni Wheel Drivetrain
The following video is a deep dive into the operation of OMNi’s drivetrain, using omni wheels. It explores the alternative drive train options available, including mecannum, tank drive, swerve drive, and 2 wheel drives. Settling on an omni wheel drivetrain the video discusses the installation of the motors and then the transformation matrix for controlling the speeds of motors to achieve a desired velocity vector.
3. Implementation of an Emergency Stop Button
After giving the robot wheels, the next stage of the build is ensuring there is a safe way to shutdown the robot should it begin behaving erratically either due to a software bug, sensor failure, or user control error. The following video explores why a simple ON/OFF switch is insufficient as an emergency stop button and delves into optimal practices for integrating a dual NO/NC (normally open, normally closed) switch and relay array for enhanced safety.
4. Unreleased Videos
The following videos (still in production) will explore the remaining steps in building OMNi
PID control of motor RPM
LiDAR and sensor EFK (extended Kalman filter)
ROS2 and path planning